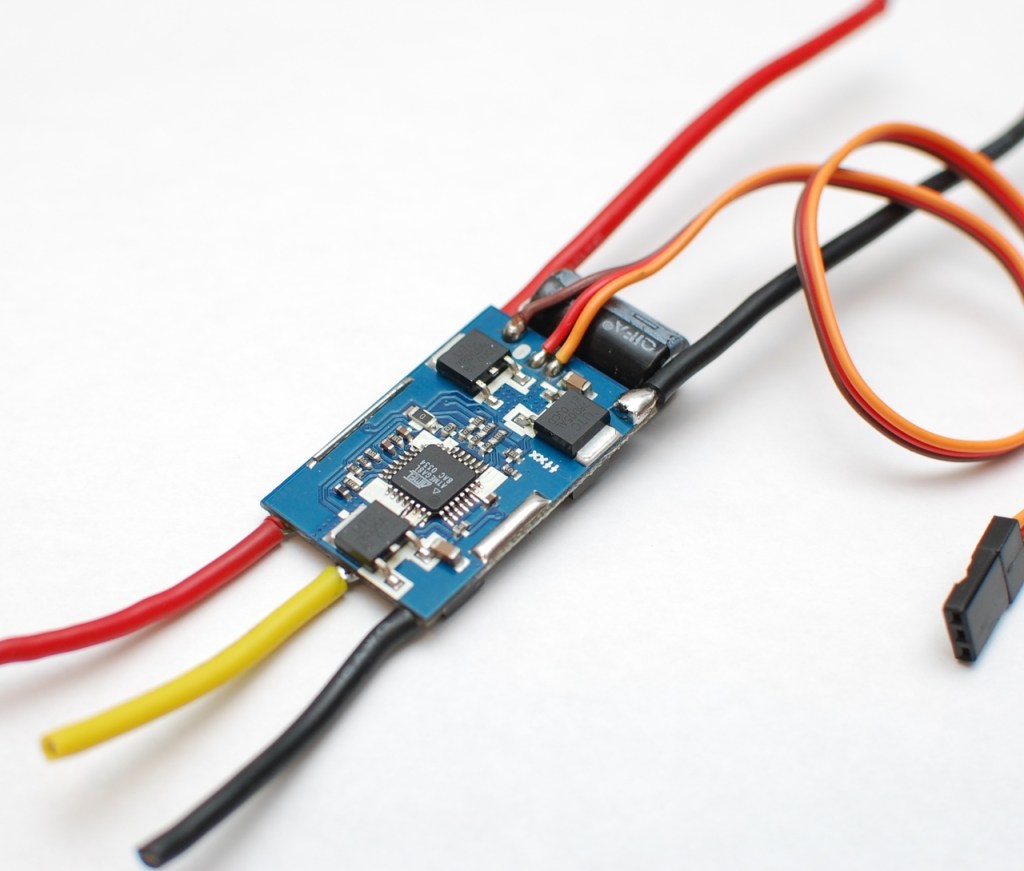
ESC: 3 wires on the left (red, yellow, black) connect to brushless motor. Two wires on the right (red, black) connect to drone’s battery. Battery Elimination Circuit (BEC) on the right with three wires (brown, red, yellow)
To illustrate the importance of an ESC for any drone, just connect your drone’s motor directly to your drone’s battery (don’t actually do this!). A few things may happen:
- Your battery may get hot, start smoking, catch fire, and/or become ruined
- Your motor may initially spin at an incredible rate before starting to smoke and/or catching fire; it’s also possible your motor will instantly burn out and cease to function without any fireworks
- Both your battery and your drone will start smoking, catch fire, and/or become ruined
Electronic Speed Controllers (ESCs) are an important component for avoiding these scenarios, serving as intermediaries between your drone’s battery and your drone’s motors.
Basically it works like this:
- Drone motors are designed to operate within a specific voltage range and a specific current (amps) range.
- Drone batteries are designed to discharge their power up to a certain maximum rate (amps) and within a certain voltage range.
Essentially, ESCs (when you size them correctly) make sure your drone’s battery and motors are both happy. Specifically, ESCs tell your motor(s) how fast to spin. As a general rule a drone motor must be connected to an ESC for power.
Take a quadcopter as an example. Manipulating the speed of individual motors is the means of controlling all three axes of orientation:
- Left-right rotation (yaw; z-axis): counter-clockwise (CCW) or clockwise (CW) motors increase and/or decrease spin
- Forward-backward movement (x-axis control): forward motors increase or decrease spin
- Up-down movement (y-axis control): all motors increase or decrease spin
At minimum an ESC will specify two essential specifications:
- Its battery rating voltage. In other words, your ESC will tell if it works with a 2S, 3S, 4S, etc, type of battery.
- Its amperage rating. This will commonly be somewhere between 20 amps and 80 amps.
The battery voltage rating is very straightforward: make sure your ESC can handle the type of battery your drone uses.
Selecting the right ESC amperage rating involves doing some calculating, based mainly on the type of motors you’re using, and how many motors your ESC will be controlling.
Calculating ESC Amperage Rating
To calculate the amps needed for your ESC, you need to know your drone’s battery voltage (1S, 2S, 3S, etc), and how much energy your drone’s motor uses.
Your drone’s battery voltage is an easy variable to nail down: it’s “S” rating. It’s either 1S, 2S, 3S, 4S, 5S, or 6S.
Determining how much energy your drone’s motor uses comes down to two factors, with the most common one being your drone motor’s amperage rating. Your drone’s rotor specifications is the second factor that has a significant bearing on its energy usage.
Drone motor amperage ratings are often provided directly. In other words, when you’re browsing motors, the motor’s peak current amp rating will be specified. 20 amps, 30 amps, 40 amps; these are all common amperage ratings.
In the common case when your drone motor’s peak amps are provided then your job is easy: get an ESC that can handle 20 amps, 30 amps, 40 amps, or whatever your drone motor’s peak amps are.
If you’re using a 20-amp ESC with a motor whose peak amp rating is 15 amps, then you’re all set and within safety margins. If you want to use an ESC to drive two motors that are each 15 peak amps, then a 30-amp ESC would be scraping the barrel to get by, while a 40-amp ESC would provide you with better safety margins.
It’s a good idea to include a safety margin of at least 20% for your ESC:
- If a motor peaks at 10 amps, use an ESC whose max is 12 amps
- If a motor peaks at 20 amps, use an ESC with a max of 14 amps
- If you’re running two 40-amp motors with one ESC (80 amps total), then round up to an ESC that maxes out at 100 amps.
While amperage is the most common unit provided for drone motors, horsepower and watts are also units that are derivatives of amps. As such you may see drone motors listed by their horsepower or watts.
If motors are not listed by their amperage rating, the next-most-common unit they’ll be listed by is their wattage rating.
This is simply an alternate way of listing amps. Here is the equation for converting between watts, volts, and amps:
- Watts = Volts * Amps
Watts equals volts multiplied by amps. If your motor’s power specification is listed in watts, calculate its amps rating by dividing your motor’s watts by its volts (your battery’s “S” rating”).
For example, a motor that’s listed as needing a peak power of 700 watts, which is powered by a 4S battery (14.8 volts), means it needs 47.3 amps (700 watts divided by 14.8 volts equals 47.3 amps). Add a 20% safety margin and that means your ESC needs to be capable of handling at least 57 amps. Basically, you’re in the market for a 60-amp ESC.
Horsepower
While the vast majority of motors are listed by their amps or watts, if you need to convert for motors advertised by their horsepower, this is the conversion factor:
- 1 horsepower = 756 watts (*this is for mechanical/imperial HP used in the USA)
Calculating ESC Amperage Based on a Motor’s KV Rating
This is actually a misnomer. An ESC’s amp rating is strictly based on battery voltage (“S” rating) and motor amperage.
A motor’s KV rating refers to how many rotations per minute (RPMs) a motor will spin, based on each increasing volt supplied (the voltage level is determined by the battery).
For example:
- A 1,000 KV motor will spin 1,000 times per minute (1,000 RPM) with a 1-volt battery
- A 1,000 KV motor will spin 2,000 times per minute (2,000 RPM) with a 2-volt battery
- A 1,000 KV motor will spin 5,000 times per minute (5,000 RPM) with a 5-volt battery
While voltage is a factor in a motor’s KV rating, neither amperage nor watts are. We need one of these (in addition to voltage) to calculate a motor’s amperage rating. Remember the equation is Watts = Volts * Amps.
A motor’s KV rating is useful for calculating variables that are based on RPM, such as lift, but a motor’s KV rating doesn’t help you in determining how many amps your ESC needs to be.
How Rotor Design Impacts ESC Amps
If your rotor is long and has a relatively high angle of attack, it’s going to use more power than a rotor that’s short and barely at an angle that creates lift. The longer rotor with strong lift is going to need more power than the shorter rotor that hardly creates any lift.
This intuitively makes sense. Think of it this way: some people might take long powerful strides and walk up three stairs with one step. Others may take less-powerful strides and walk up one stair one step at a time. If you’re taking steps at the same pace (time period), the person walking up three steps at a time is going to need three times as much energy as the person walking up one step at a time.
This is why rotor design impacts a motor’s amperage rating. While it’s possible to do relatively complex calculations to estimate a rotor design’s impact on a motor’s amperage rating, here is a more simplified way of estimating a rotor design’s multiplier effect on a motor’s amp rating:
- An average rotor doesn’t add or decrease from a motor’s amperage rating; the rotor is neither optimized for high lift or for low lift. Let’s say this rotor+motor combination requires a peak load of 30 amps
- A low-lift rotor that doesn’t provide much lift, combined with this example motor, only requires 70% of the average amps, or 21 amps
- A high-lift rotor, a rotor that provides an above-average lift, combined with the example motor, uses 130% more than the average rotor+motor combination, or 39 amps
To sum this section up, you can generally calculate the amps you need for an ESC based on the battery you’re using (your battery’s “S” rating) and how many amps your motor needs. However if your rotor’s lift is average, below average, or above average, this will throw in a multiplier effect when you calculate the ESC’s amp rating:
- Average rotor lift: 9 inches in length for every 1.5 inches in width; 9 degree pitch. Multiplier is x1
- Lower-than-average rotor lift: less than 9 inches in length for every 1.5 inches in width; 5 degree pitch or less. Multiplier is x0.7.
- Higher-than-average rotor lift: greater than 9 inches in length for every 1.5 inches in width; 10 degree pitch or higher. Multiplier is x1.3.
Using ESC Amp Calcs to Determine the “C” Value Needed for Your Battery
Once you’ve figured out how many max amps your ESCs need to provide, you’ll be able to tally up the total amps for your ESCs and use these to determine the “C” value you need for your drone’s battery.
One ESC for Multiple Rotors
Drone designs are flexible, and it’s entirely possible for one ESC to control multiple rotors. If this applies to your situation all the same rules apply: calculate how many amps your ESCs need to handle.
For example, two 20-amp motors controlled by one ESC means the ESC needs to manage a total of 40 amps, plus a recommended safety margin of 20%. That means your ESC needs to be able to handle 48 amps, which when rounded to the nearest equivalent available on the consumer market, means an ESC that’s rated at 50 amps.
The practicalities of controlling the flight of a drone copter mean that you need a minimum of two ESCs. This holds true whether you’re operating a quadcopter, hexacopter, or octocopter.
Basic ESC Operations
At minimum ESCs will control how fast your drone motors spin, enabling control of the X, Y, and Z axes.
Typically ESCs include an auditory (beeping) cue that notifies you when your motors have been activated, and subsequently when they’ve been primed to receive motor spin input data.
A typical ESC priming procedure might be:
- Turn on your wireless drone controller
- Power on your drone’s battery
- Your drone’s ESCs are awaiting their arming sequence input (this “awaiting” status may have its own auditory signal)
- Initiate drone arming sequence:
- Set your throttle to full power
- Drone ESCs will beep in a confirmatory sequence
- Set your drone’s ESCs to minimum throttle
- Your drone’s ESCs will beep in a sequence that indicates they’re ready to receive flight control commands
- Now your drone is “armed” and ready to fly; you are now free to send flight control commands to your drone: climb, descend, turn, throttle, etc
Additional Extra ESC Features
In addition to the standard basic auditory cues to alert a pilot when a drone has been armed and is ready to fly, ESCs are also commonly advertised as including features like:
- Voltage warning: this alerts the pilot when a drone battery’s voltage has dropped below a minimum threshold
- Temperature protection/thermal shutdown: monitors motor and ESC temperatures to prevent overheating; issues alerts or commands for shut-down if necessary
- Customization for fine-tuning controls such as brakes, throttle, and timing
- Data-logging (flight data recorder/blackbox) for time-stamped variables like current draw, voltage, and temperature
- Bluetooth compatibility: ESC extra features can be accessed by bluetooth
- Battery elimination circuits (BECs) are often included
- GPS, barometer, and altitude values
- Telemetry data
